R2-D(Pi), Drexel freshman design project is essentially a project, lead by Ryan Siwinski, Aniket Dandegaonkar, and David Hammer (please see below for each member's bios) to create a wirelessly controlled robotic waiter that will function in a restaurant setting. The robot will utilize a "Raspberry Pi" 2 and will carry a phone application (created by us) that will be our menu in which the customer will be able to pick what they want through the application and the robot will then give the order to the chef. The Raspberry Pi will allow us to code our robot and input the functions it needs to be a functioning waiter/waitress.

Although this may seem complex, in simple terms we will be creating a robot that will act as a waiter and we will be able remotely control it. This freshman design project will last for 10 weeks in which we must finish building the robot, finish the phone application and have a fully functioning and remote controlled, wireless robot. Our objective for this entire project is to create an innovative idea for people of all ages to be interested in and enjoy.
Background
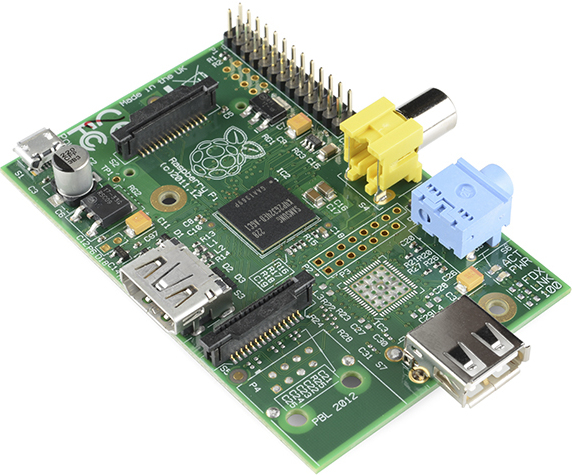
What is a Raspberry Pi you may ask? In simple terms, a Raspberry Pi is a very cost efficient, subjectively practical or impractical computer that is the size of a credit card which is convenient for serving as a piece in a robot. The function of the Raspberry Pi in our project is to serve as a platform for us to program and code our robot's functions. The Raspberry Pi can be plugged into a computer monitor or TV and has an SD card port to store memory. The interest side of the Raspberry Pi is that it can run using the operating system, Linux and can be programmed by a plethora of languages such as Python.
*If you are still having trouble with the concept of the Raspberry Pi, this video will surely help out,
- https://www.raspberrypi.org/help/what-is-a-raspberry-pi/
and you can find more info on the Raspberry Pi through,
- https://www.raspberrypi.org/
R2-D(Pi) Group Bio
* Aniket Dandegaonkar (Team coder and designer) - Currently a 5-year electrical engineer, international student. Aniket attended St. Vincent's High School in Pune, India. Aniket is competent in Python, Java for engineering, HTML, MATLAB, AutoCad, Creo and JFrame. He has taken MIT edX courses for intro to computer science and programming in Python and circuits and electronics. He has completed two freshman engineering projects, Rube Goldberg design project and NXT competition design project.
* Ryan Siwinski (Team builder and designer) - Currently a 5-year mechanical engineer, from Pennsylvania. Ryan attended Upper Dublin High School. Ryan is competent in MATLAB, AutoCad and Creo. He has completed two freshman engineering projects. First, Rube Goldberg project and second project being bridge/architecture design.
* David Hammer (Team blogger and designer) - Currently a 5-year electrical engineer, from New York City. David attended New Explorations into Science, Technology and Math high school in which he worked on an astronomy/engineering based project called the Radio Jove telescope. The Radio Jove telescope is used currently in his high school to keep records of Jupiter's frequency signals. He has also worked on two freshman engineering projects thus far; first being the Rube Goldberg project and the latter, NXT robot. The NXT robot was also programmed with NXT 2.1 Programming. David has experience in AutoCad, MATLAB and Creo.
R2-D(Pi) Advisor Bio
*Nagarajan Kandasamy is an Associate Professor in the Electrical and Computer Engineering Department at Drexel University. He holds a Ph.D. degree from the University of Michigan and his research interests include dependable computing, embedded systems, self-managing systems, and computer architecture. Dr. Kandasamy is a recipient of the NSF CAREER award in 2007 as well as best student paper awards in the IEEE Conference on Autonomic Computing in 2006 and 2008.
Weekly Progress
Week 1:
- Our goal this week is to finish buying all the supplies we need to complete our freshman design project.
-We will begin designing our robotic, wireless controlled waiter/waitress. We have begun categorizing each part and deciding where each will go for the robot.
-We have gained access to a great adviser for our project, Nagarajan Kandasamy and will continue to work with him for the rest of the project.
-We have designated tasks and positions for each group member.
- We have finished listing the significant parts for the design of our virtual waiter/waitress.
Parts:
- Raspberry Pi

- Materials for robot's frame, preferably cardboard
- Tamiya spike tire set (2 sets)

- Web cam
- Tablet/phone for "menu"
- Linux Kernel operating system

Week 2:
-We have begun buying parts for the initial design of our project such as the Raspberry Pi.
-The initial prototype of the robot is currently being designed.
-We are discussing and searching for the rest of the parts needed to complete our prototype of the robot.
Week 3:
-Discussed minor project issues with project advisor, professor Kandasamy such as motor control and utilization of an H bridge.
 (H bridge schematic design)
(H bridge schematic design)-Determined the layout of the Raspberry Pi in conjunction with the H-bridge and the motor. The H-bridge will be connected to the Raspberry Pi and in return the Pi will be controlled by the user. The user will determine the amount of speed that the motors will be moving at.
Week 4:
-The proper programs needed for the initial functions of the robot has been fully installed into the Raspberry Pi such as Linux.
-We have discussed specifics on the rest of the parts we need for the robot. We are currently searching for a motor, optimal robotic wheels, H bridge to control the power used by the motor through the user's control and materials for the frame of the robot.
- Discussed functions, collaborations, optimal brands and specifications for the motor at Drexel Lab
-R2-D(Pi) is also now live on Trello.com, (https://trello.com/dlabdrexel)
Week 5:
- The design for the chassis and base of the robot is being finalized
-We have designed the shape and layout of our robot frame, which will be made out of cardboard as our final mold.
- The layout of the electronic mechanics located on top of the base of the robot have been designed. Electronics such as the placement of the Raspberry Pi, H-bridge, web cam, etc.
Week 6:
- We have received the H-bridge piece and are beginning to incorporate the H-bridge into the robot design we have.
- The H-bridge will connect to our Raspberry Pi; the Pi will contain the program which will allow the robot user to explicitly control the amount of energy used within the motor. In other words, the user will be able to control the speed of the robot because the H-bridge controls the voltage of the motors.
Week 7:
- The chassis and frame have been finalized and built along with the implementation of the motor, H-bridge and wiring into the frame.
- The robot frame and chassis will be held together by a circular-shaped plastic bin that we will use to house the electronics and wiring.
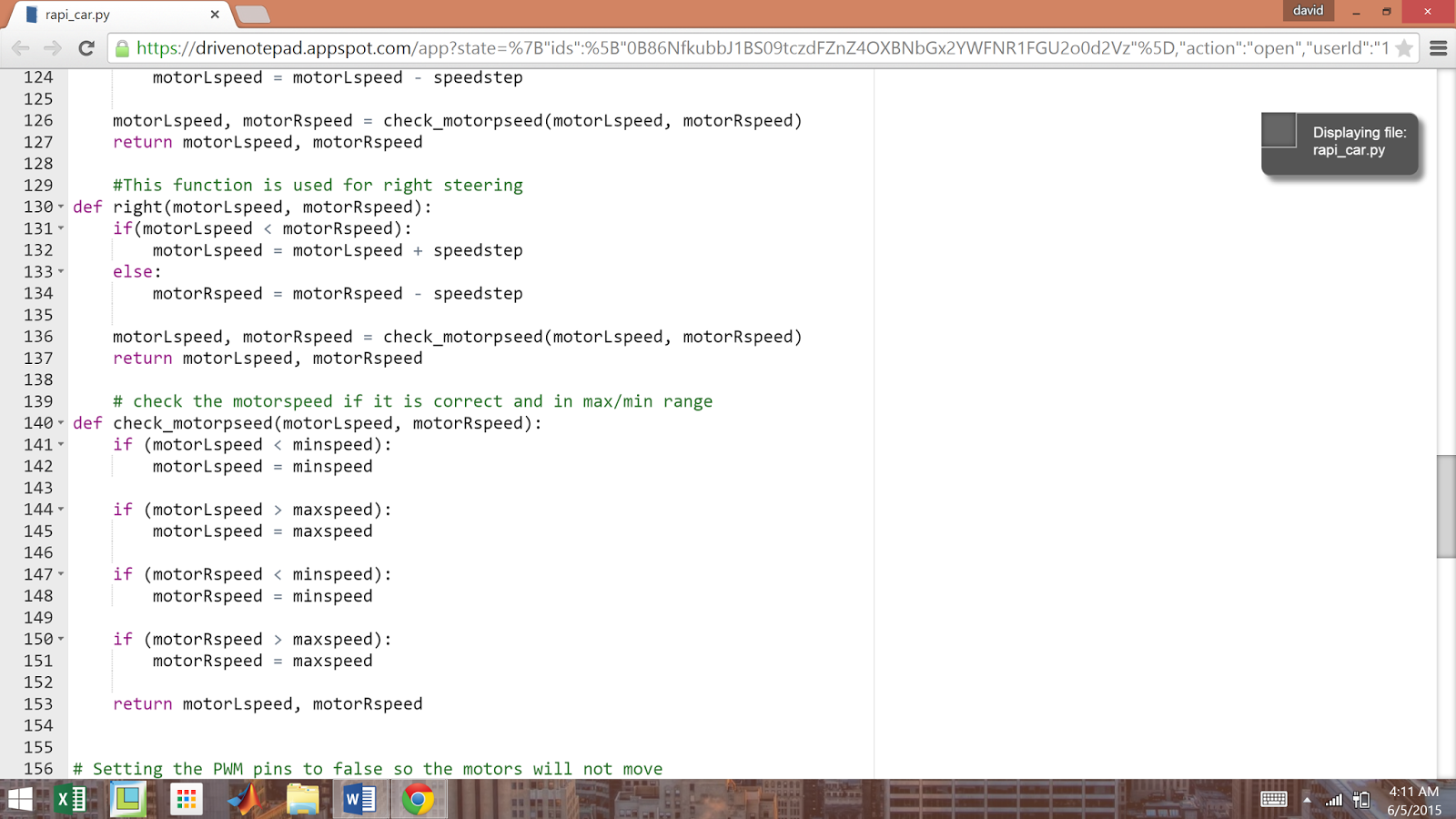
- Pseudo code for the Python programming facet of the robot is currently being designed. The code will allow the robot to function under our command through a wireless controller.
Week 8:
- Python code utilized to program the functions of our robot is being finalized.
- The chassis and frame have been updated with a new, longer axle
Week 9:
- The build has been updated for the robot; the frame is held together by a new-mold shape. The frame will also be updated with a thicker mold of cardboard.
- Python code is finished which helps program the movement of the robot. The user will be allowed to control the entirety of the movement of the waiter/waitress robot.






Week 10:
-The wifi adapter has been implemented into the project and is being utilized for the Raspberry Pi webcam. Now rather than connecting the Raspberry Pi to the laptop through an Ethernet cable we can connect the Pi wirelessly.
-The java code is being finalized. The java code allows us to implement a phone on to the robot frame to be used as our "menu" for the restaurant. Java code will be used for the app in order to design our menu for the robot. The java GUI program gives us a touch screen interface.
-Robot frame has been finalized. The two motors will be resting on the bottom of the frame, a platform will be holding up the battery pack, H-bridge and Raspberry Pi.
-The robot will be tested as soon as the H-bridge is connected and finalized with the Raspberry Pi and frame.
-The robot has been tested and is not functioning properly because the H-bridge has malfunction and the connection has not occurred between the Pi and H-bridge.


